Design of a Neural Net based controller for a lander on Mars / Mise au point d'un contrôleur à base de réseau de neurones pour un atterrisseur Martien
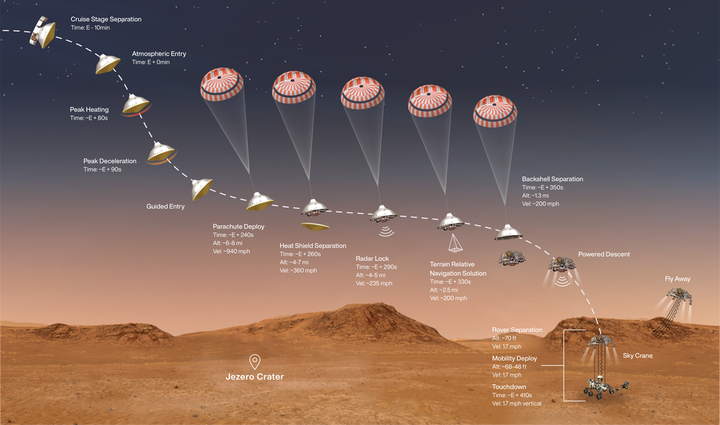 NASA JPL Perseverance landing
NASA JPL Perseverance landing
Conception d’un réseau de neurone /contrôleur/ par interpolation à partir d’un contrôleur de référence, tant pour la partie stabilisation que pour la partie guidage.
Dans le cadre d’un projet avec l’ESA (European Space Agency), nous étudions les propriétés d’algorithmes de guidage à base de réseau de neurone (NN), pour une mission d’atterrissage sur Mars. En effet, il est possible de substituer un contrôleur classique, comme un contrôleur PID, par un NN. L’objectif de ce stage est d’expérimenter la conception d’un tel contrôleur à partir d’un contrôleur de référence. Par exemple, utiliser un contrôleur PID pour générer des données qui serviront ensuite à l’apprentissage du NN.
Dans un premier temps, on pourra s’intéresser à la stabilisation d’un modèle de fusée et à la conception du contrôleur NN. Ensuite, on pourra étudier les algorithmes de calcul de trajectoire pour l’atterrissage (pinpoint landing à la SpaceX ou BlueOrigin) et leur utilisation pour l’apprentissage d’un algorithme à base de NN.